My Assignments
Assignment #2: Strategy
Problem Statement:
The purpose of my design is to create a trash can that will replace the trash bag in the empty can automatically. This will make the process of taking the trash out shorter by eliminating the frustrating manual replacement of bags. We all know the feeling of wrestling with your trash can to get the bag on, getting rid of this problem would make the whole process much easier.
Assumptions/Specifications
Some simple specifications of this device would be that it would be helpful if it were compatible with a wide range of trash bags. Preventing the need for special bags to be purchased. If this is impossible, then we would at least need to have it replace a bag comparable in size to standard trash bags. It would need to have a way to know when the trash bag needs to be replaced. It will require a method of sealing the bag so that it does not slip once in place.
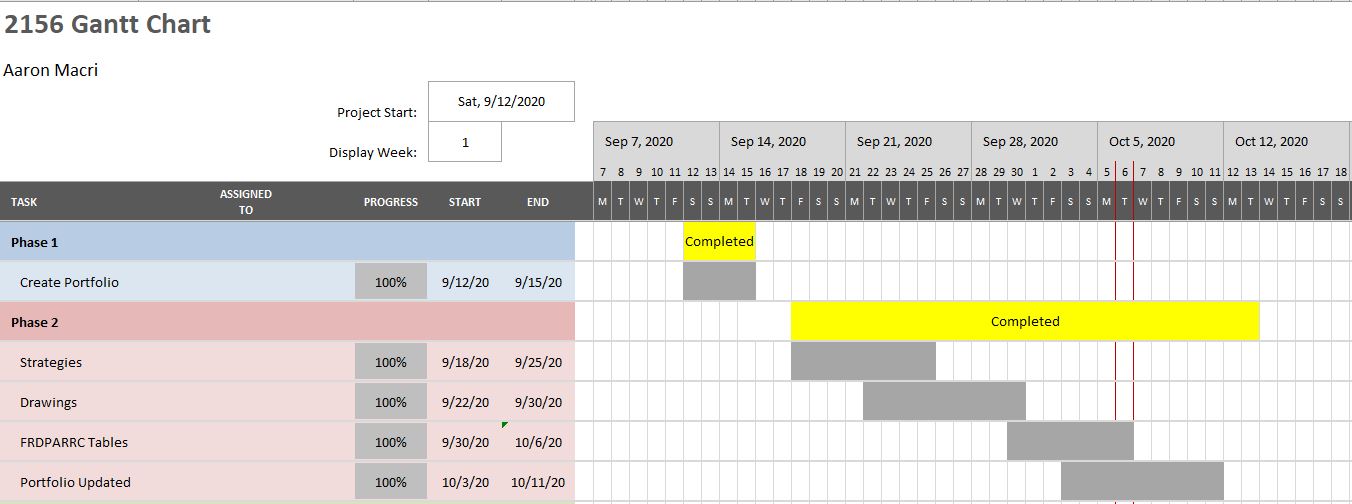
The above image is the Gantt Chart for this project. This will be continually updated as the semester progresses and I get more knowledge of the future assignment details. Therefore, each assignment will be a slightly modified and more updated version of this gantt chart.
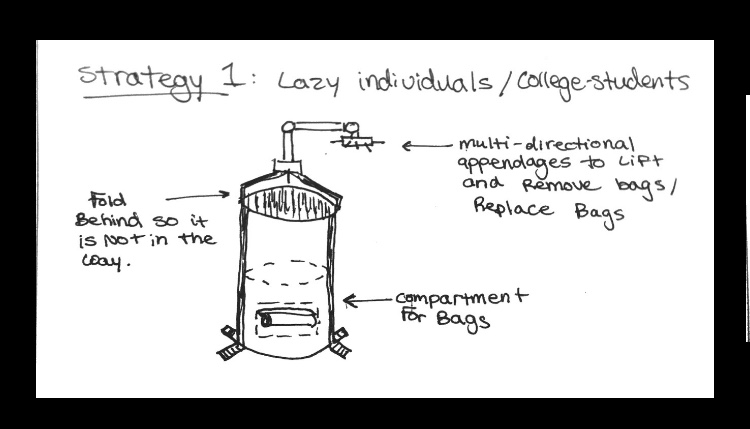
Strategy 1: The lazy-man's bin
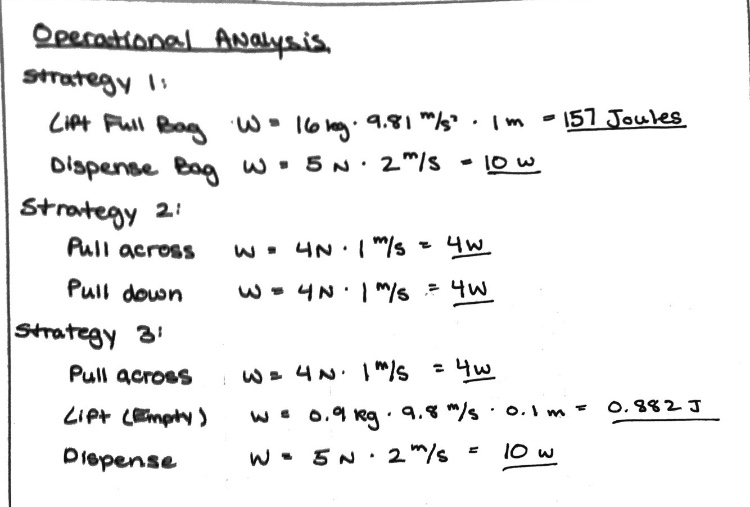
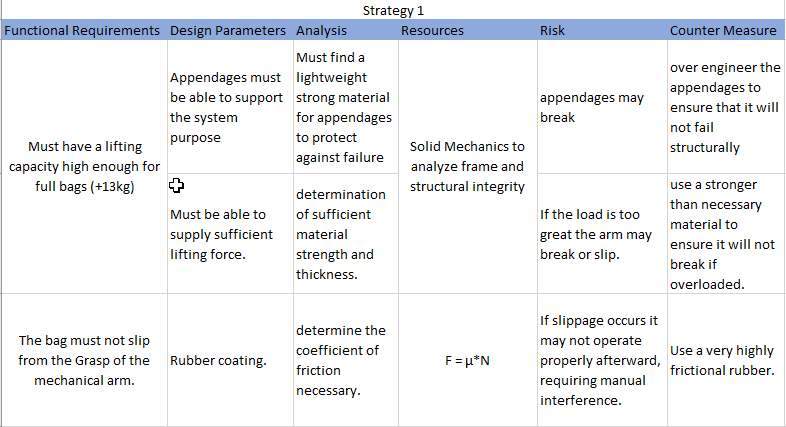
For Strategy 1 I would like to not only replace the trash bag once it's removed but to have an additional control arm which could assist in removing the bag from the can. It would automatically detect a full trash can, automatically seal and lift the bag from the can, then the arm could replace the bag again.
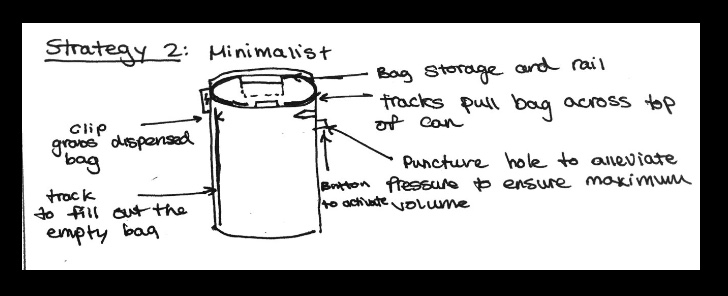
Strategy 2: The minimalist bin
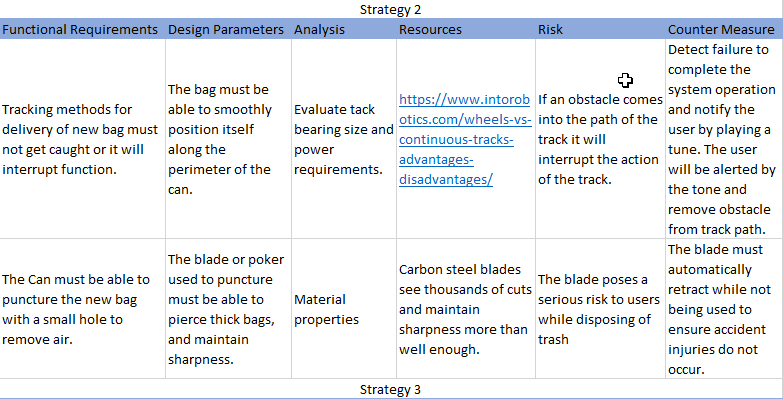
For Strategy 2 I want to try and take the most cost effective and simple mechanical solutions to ensure that it can be used but is not overly complicated/expensive. It will have a section for bag storage, tracks to dispense a bag. Tracks to drag the bag to the bottom of the can and the sequence will be button activated. This would appeal to individuals who like the concept but don't need anything too fancy.
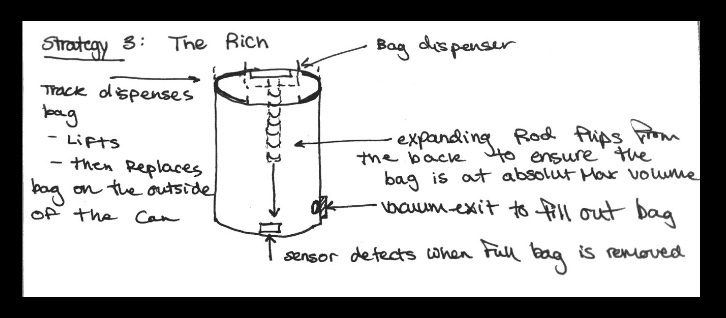
Strategy 3: The Rich Guy Bin
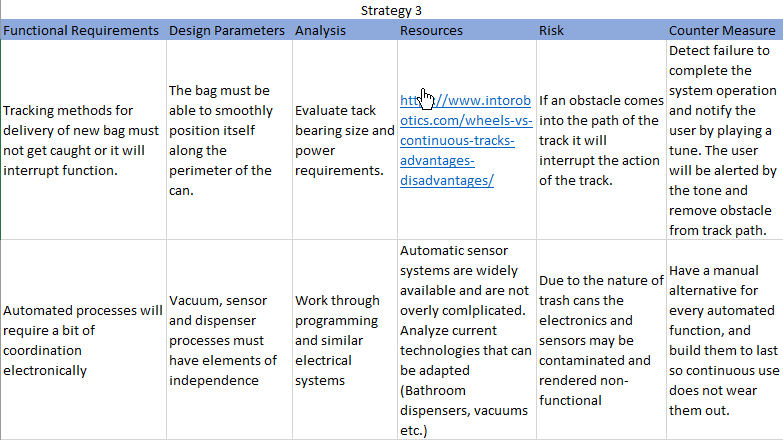
For strategy 3 I appeal to those individuals who can afford the luxury of a self-changing trash can. It will have all the bells and whistles and will ultimately be much more desirable. It will include a vacuum in the bottom to pull air out of the can to better fill it with the bag. Sensors for automatic activation of the system. Along with a rod that will have an expanding circumference to push the bag to the bottom and the sides of the can.
High-level Operation Analysis (Strategy 1-3)
FRDPARRC Tables (strategy 1-3)
Lessons Learned
- Learned how to better organize myself through Gantt Charts.
- Learned how to think broadly about what kind of logistics go into design.
- Learned how to effectively brainstorm multiple problem solutions at once.
- Learned that FRDPARRC Tables stink and require a lot of consideration.
- I learned that there is A LOT of planning that is required for tackling even the easiest of product production.
- Learned how to make a FRDPARRC table that assists in organizing and comparing multiple strategies at once.
- Learned that you cannot procrastinate design, thankfully I did not. Alloting myself time to work through my creative processes enabled me to develop an overall better idea.
Activities Date and Time
- Brainstorming 10/6/2020 6pm-8pm
- Gantt Chart 9/18/2020-10/10/2020 intermittently
- Strategy Selection / Elaboration 10/7/2020 1:00pm-3:30pm
- Sketches 10/7/2020 5:00pm-7:00pm
- Operational analysis 10/8/2020 4:00pm-5:00pm
- Generate FRDPARRC tables and Sketch 1/25/18 5-9pm
- FRDPARRC 10/9/2020 1:30pm-5:00pm
- Perfect strategy drawings 10/9/2020 8pm-9pm
- List Lessons Learned and Activities Date and Time 10/10/2020 7pm-8pm
- Import Organized information into HTML 10/11/2020 8pm-9:30pm
- Give Advice to Jazmin Ramos 10/12/2020 6pm
- Final Check of Website and Update based on Advice 10/12/2020 9pm
Comments for Jazmin Ramos
- I actually cannot access your assignment 2! I'll check back soon to re-evaluate this.
- Reading through some of your other pages, make sure to re-check spelling.
- I really like the way that you completed your assignment 2a, it is a bit cluttered but I admire your dedication!