Problem Statement: The purpose of the design is to be an easy operation, or automated, cat box that gathers is capable of moving up to 3lbs of waste into a set trash area.
Assumptions: The design for the litter box should eliminate the need for using a hand-held scooper and needing to put cat waste away after each scoop. The components chosen for the module should be easy to manufacture, durable, and easy to use after assembly.
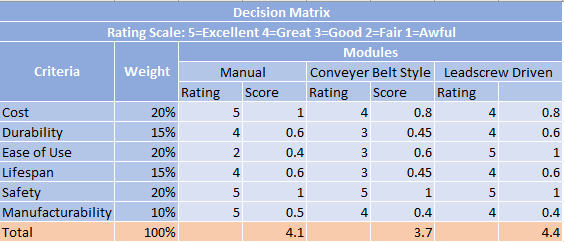
My decision matrix was used to compare my three modules in what I believe to be their most important categories: Cost, Durability, Safety, Ease of Use, Life span, and Manufacturability. I compared the values using a weight and point scoring system for each component and developing a score to find which strategy to choose
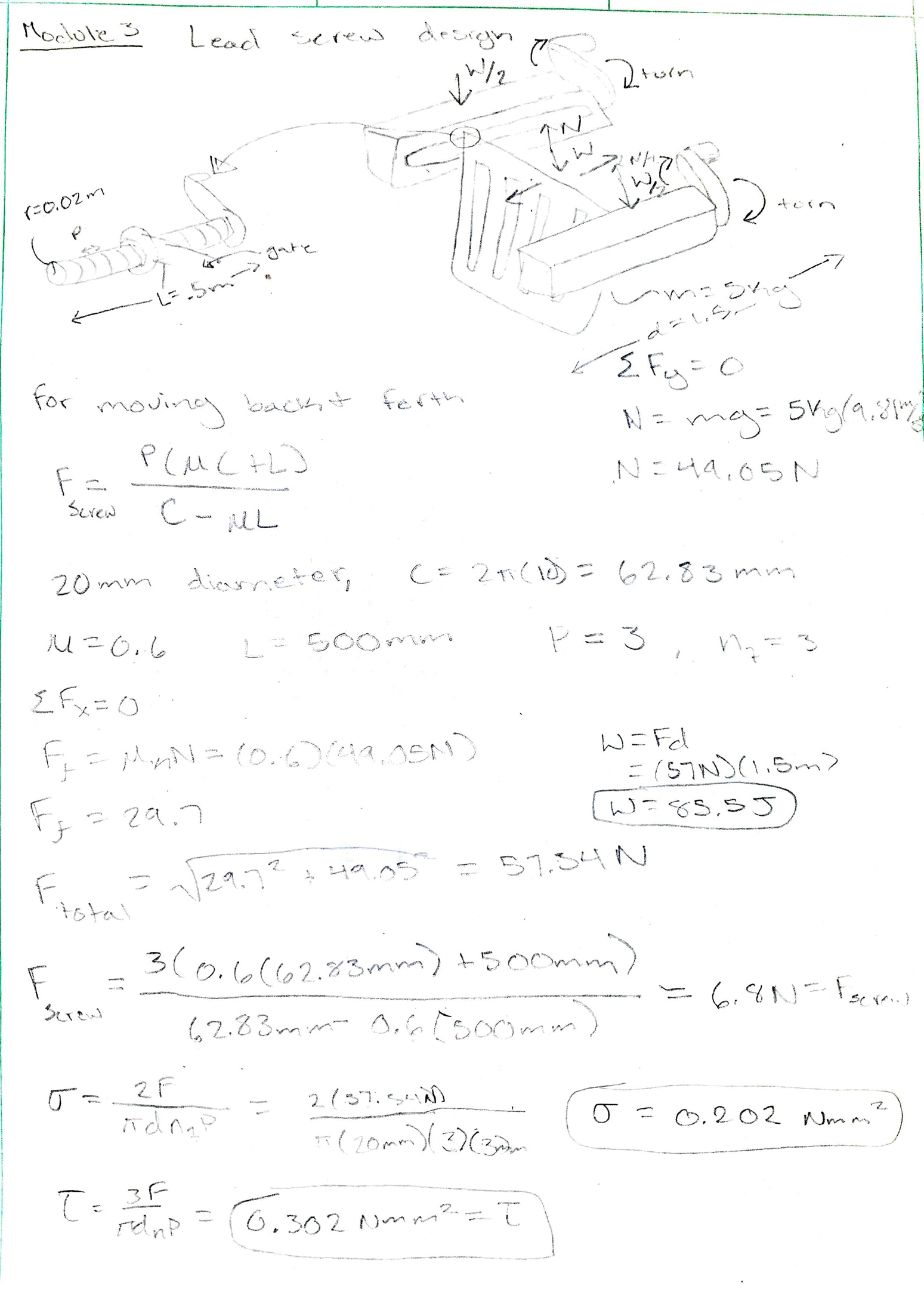
My Leadscrew Design was my best because of how great it is in all categories compared to the other two. The leadscrew design shines in terms of ease of use and durability. This catbox should be easy operational and have enough power to be able to successfully push all cat waste to one trash location. What's great about the leadscrew is how power can be easily added to turn the crank automatically.
The Manual was a close runner up to the leadscrew because of its Cost Size and Safety. This module falls short in the fact of how inneficient it would be in terms of scooping a catbox- it would probably be easier to use a scooper than manual push the waste back and forth by hand.
The conveyer belt scored the lowest. Although it is very safe and and easy to manufacture, this product is not very durable and I believe would need extra components/assistance to keep the cat scooping tray from sliding over the waste as it moves with the belt. More weight would need to be added which would cause higher cost in materials and a higher cost for power due to pulling a heavier load.
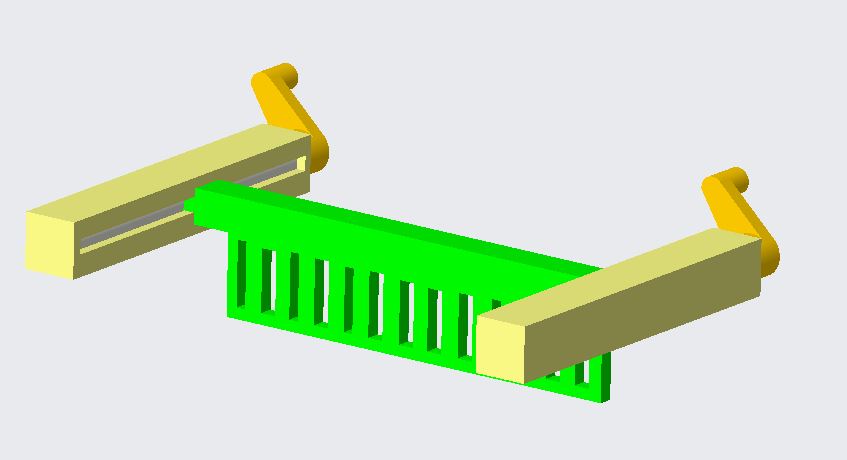
Model of components Assembled.
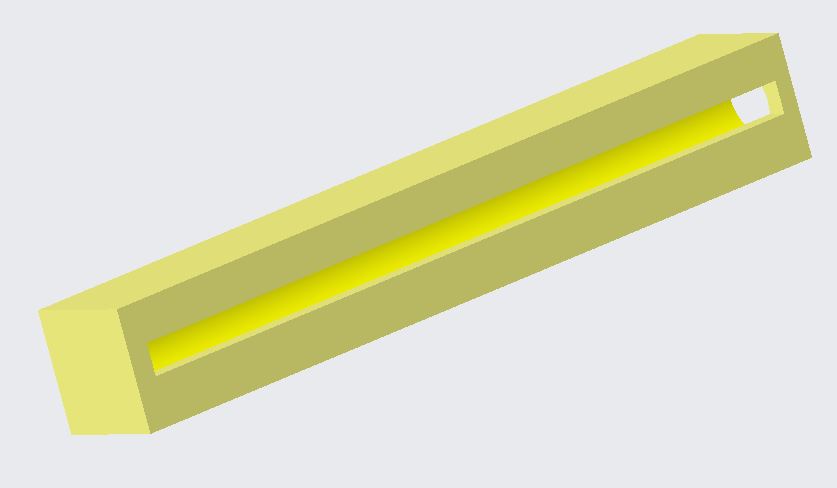
This is my base component that will hold the lead screw and basically be the support for the catbox. It is a more compact view of the wall of where the lead screw would be attached for simplicity.
| Functional Requirements | Design Parameters | Analysis | Resources | Risk | Countermeasures |
|---|---|---|---|---|---|
| Durable | Must not bend or deform from the weight of other parts | The inside is hollow with the leadscrew going in so it must be able to bear this weight | Materials/Statics σ=Fn/A | If the material is not strong enough the box sidings can twist and break. | Use a stronger material like aluminum since it is easy to manipulate but very strong. It would be able to withstand the shear stress |
| Hold the catbox gate & lead screw in place | The inside hole for the leadscrew must be big enough for the screw and the gate to fit around it. Also the opening must be closed in just enough for the screw to not be pulled out and have it possible for the gate to attach within. | ΣFy = 0 ΣM = 0, 𝛕 = V/A | Physics | If there is too much friction pulling the part may break and the lead screw would be thrown out. | Include a safety factor in calculations |
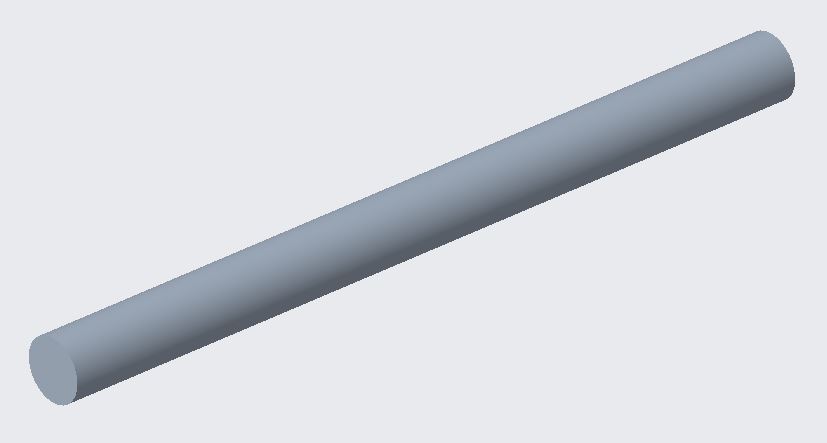
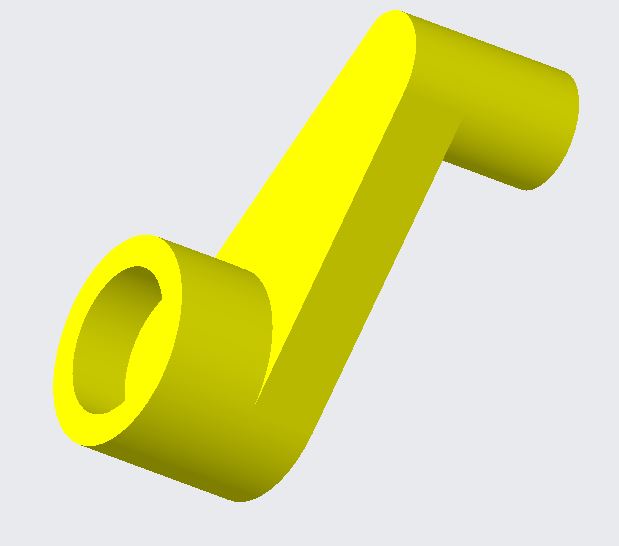
Due to my lack of 3d modeling skills I have modeled the screw for my leadscrew component as a tube. Please imagine it as if there were threads in it. The lead screw serves the purpose for being able to move the catbox gate back and forth.
| Functional Requirements | Design Parameters | Analysis | Resources | Risk | Countermeasures |
|---|---|---|---|---|---|
| Size | Must be long enough to go the entire way of base, but skinny enough to fit within the base. | Length shorter than box L=450mm, skinny enough, r=20cm | Solids/Statics/Sophmore Design | Wobbly inside, unable to be secure enough to be able to move the cat gate through box. | Choose correct dimensions and measure everything prior to creating actual prototype. | Power | Hand operated or attach a power source to rotate the handle that is attached. | P=IV, W=Fd | Basic E/Physics | More than enough power supplied to wheel the gate forward and backward. Around 50W of power to fully ensure. |
| Sturdy/Strong | Must be able to not deform/break while holding both the gate and own weight up/moving along box. | W=fd, W=mg | Physics, Materials | Could potentially snap inside or bend downward not allowing the gate to be moveable | Supplyt stron enough material, perferably steel for the screw. |
| Rotation | Must be able to rotate properly within the base from the handle | T=rFsintheta | statics | Not being able to scoop box using mesh gate | Allow enough space within and include factor of safety for supported weights |
This component is the handle that will be attached to the leadscrew at the outside of the catbox. Turning the handle around will provide mobility of the gate back and forth through the box.
| Functional Requirements | Design Parameters | Analysis | Resources | Risk | Countermeasures |
|---|---|---|---|---|---|
| Durable | Must not break off when being turned and withstand the force | able to withstand stress/shear stress σ=Fn/A, 𝛕 = V/A | Materials/Statics | If the material is not strong enough the handle can crack/break off | Use a stronger material like aluminum since it is easy to form into shape, but very strong. It also can withstand shear stress well |
| Lead Screw | Screw is used as a basis for where the power gets supplied to move the mesh gate back and forth | T=rFsintheta | Statics | All waste may not be collected if full cycle cannot be performed | Supply more energy/force for more torque capabilities, so box needs a minimum force of .5-1N |
| Strength/Durability | The dome must be able to be strong enough to rotate and lift waste far enough so that it actually gets disposed of | W=Fd, W=t*theta | Physics | Waste may be too heavy and dome may not be able to do its full rotation | Provide excess energy to combat heavier waste, so if 2joules of energy needed, make it capable to provide 5joules of energy |
| Rotation | Must be able to rotate the leadscrew and be strong enough to do so | T=rFsintheta, P=IV, W=Fd | statics/physics | Not being able to rotate the leadscrew | Strong enough attachment to screw that it will rotate with it and not break off |
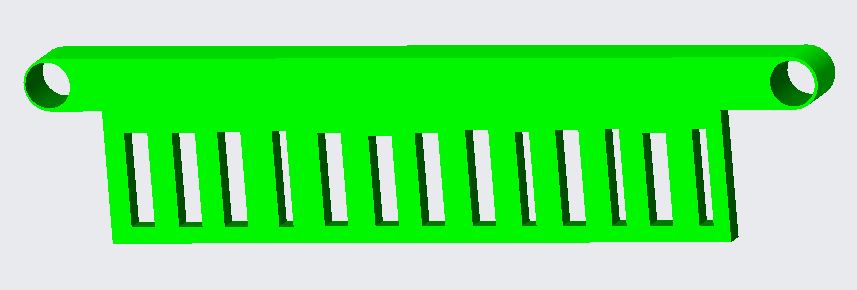
My last component for the module is the gate. The gate is the moving component that is attached on both sides around the lead screw.
| Functional Requirements | Design Parameters | Analysis | Resources | Risk | Countermeasures | Attachment sides for the lead screw | Hole must be big enough to fit around lead screw, but only thick enough so that it can fit inside of the base | Consider how much tolerance will be needed and spacing between parts. T=(UL-LU)/2 | Sophmore Design | Might not be able to fit within the base, or too tight to move back and forth freely | Minimum .3mm spacing between parts |
|---|---|---|---|---|---|
| Sturdy/Strong | Must be able to push all cat waste out of box on it's own | W=fd, F=ma | Physics | The mesh scooping panel can get stuck on cat waste, or break if unable to push through litter box. | Input supportive features like making it weighted with a heavier material and also thick enough supports attached to the lead screw so that it won't twist to ensure the mesh wall stays upright while pushing up to 1kg of waste. |
| Mesh panel | Must be able to only push cat waste from box and not empty out the cat litter contents without breaking | σ=F/A | solids | mesh can break | thicker/stronger mesh to ensure it is strong enough to push through cat box |
Gantt Chart
Activities:
12/1 Design Matrix 4pm-5pm
12/1 Gantt Chart: 5pm-7pm
12/2 Concepts: 7-9pm
12/2 CAD: 7-9pm
12/3 FRDPARRC Tables: 11pm-1am
Lessons Learned:
I learned that these projects are starting to take more and more time and I need to work on my time management skills, I find myself always doing my assignments last minute and it is really hurting me. I also gained a little more experience with CAD modelling which I am not great at.
Comments to Advisees:
Not up when I looked.
I like the layout of your website it is super easy to look at and navigate. Your concept images are well drawn and the equations were well thought out. I tell see you put alot of effort into thinking of new concepts for your design.Good job!