Assignments
Assignment #4: Modules
Updated Problem Statement:
Design an instrument for a more effective transfer of laundry from the washer to the dryer. This device, of a selected model, will contain the ability to fold clothes, too. This device should allow for a quicker way to complete house-hold chores without having to be present in the case that everyday life gets in the way. The automatic transfer and optional folding of laundry will eliminate the issue of worrying about soaking clothes that have been forgetten in the washing machine all day. The machine will have automatically retractable arms with mesh baskets attached that make for an easy scoop and transfer. Another specification is that it can be programmed to perform for both top and front loading washing and drying machines. The machine will also have an additional programming option to fold the laundry once it's dried. This device should be manufactured so it can be easily used, assembled, and cleaned by any able-bodied persons of an independently functioning age.
Assumptions:
This device should have impeccable grip strength as the design selected will have the ability to fold clothing once the laundry duties are complete. This being said, the Grip Claws that will be placed on either side of the device, acting like human arms and hands, should be highly mobile so that articles of clothing of any materail, shape, or size will not generate issues for the machine, making this a highly desirable product for households and businesses all across the world. It should be safe, cost efficient, and generate desired results at quick speeds.It should be cost efficient and safe for every day use.
Pugh Decision Matrix
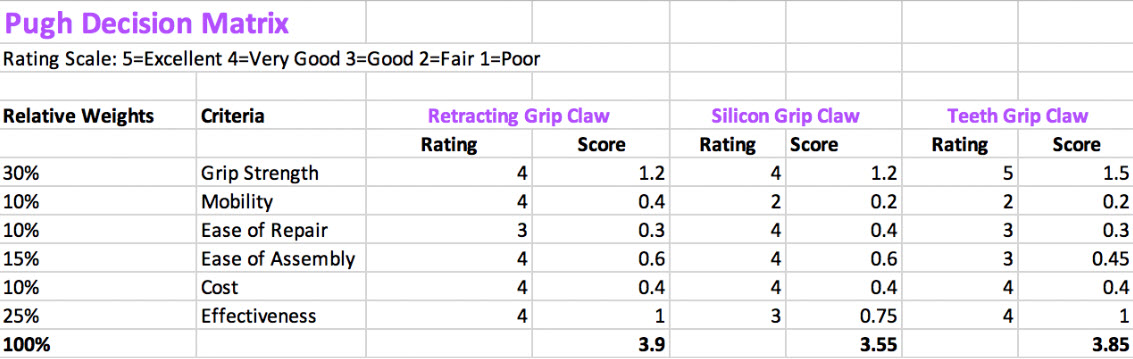
The Pugh Decision Matrix that can be found under this webpages "Assignment 3" tab displays that of the three original models that were created, "The Busy One" was the best option to move forward with when it came to further analysis of the design. The Pugh Decision Matrix that is displayed above analyzes the three different modeled versions of "The Busy One", all having to do with what type of folding claw will be the most effective and dependable compared to all of the other options. In this decision matrix, the categories that were considered are Grip Strength (of upmost importance), Mobility, Ease of Repair, Ease of Assembly, Cost, and overall Effectiveness. Although all of the offered designs do have unique strengths and weaknesses, the best possible claw design is the Retracting Grip Claw. Although the Teeth Grip Claw was very close in overall rating, the tell-all was the amount of mobility that was offered by each. With the additional retraction that was offered by the first Module, it took the crown for the best option for the final design of the product. For further analysis of each claw type, justified CAD Models and calculations can be found below under "Modules".
Modules
Module 1: Retracting Grip Claw
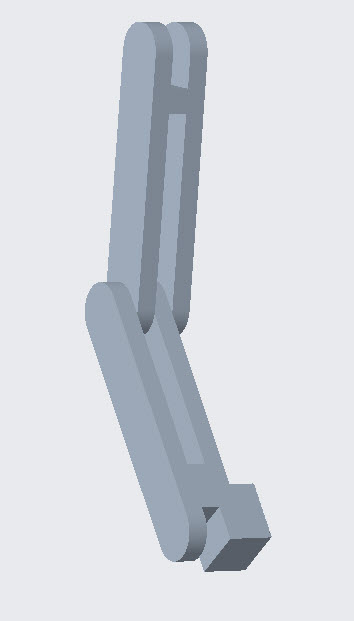
The Retracting Grip Claw is a relatively basic design model that has all of the needed features in order to generate a working and reliable product. The allowed mobility of the claw allows for the option of a more precise fold. With the textured grippers on the end of the claw, which there will be two of on either side of the model, making two crab-like claws, the machine will be able to grasp clothing of all different materials which is an important feature when it comes to the desirability of this product.
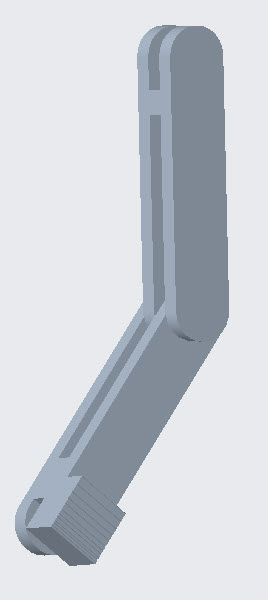
Module 2: Silicon Grip Claw
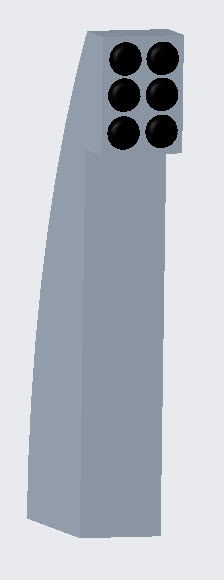
The Silicon Grip Claw is the least mobile of the three designs, but it was designed to have incredibly good grip strength. Like all of the displayed features, this is only one side of the claw that will be placed on each side of the design, generating actual claw-like movements on either side. As seen in the displayed models, there are six silicon (represented with black) abrasions that surface on the inside of the claw. Each of these are placed evenly and strategically along the surface of the grip claw in order to be most effective. Materials other than silicon were considered, and although there are concerns such as its reaction to material such as wool, it was the best allowable option.
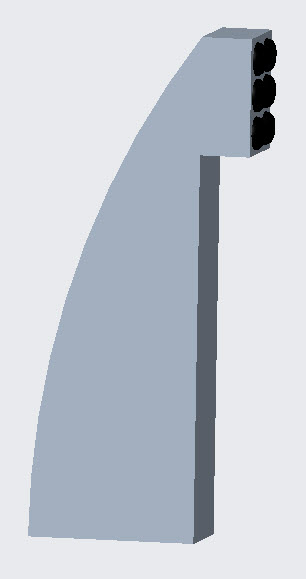
Module 3: Teeth Grip Claw
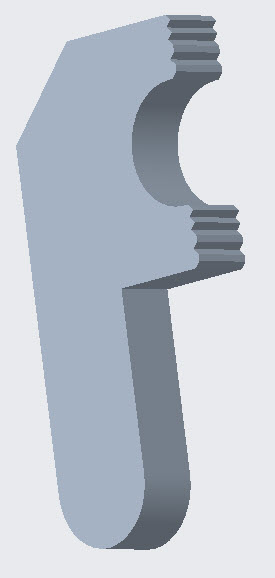
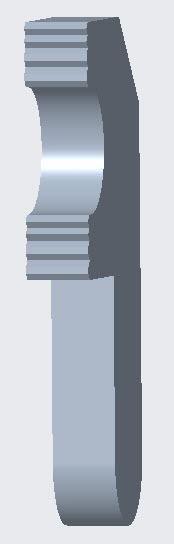
The Teeth Grip Claw is suggested as having the best grip strength, but lacks in mobility and versatility. With a wrench-like shape on either side of the claw, it is desgined to be able to handle articles of clothing that may be larger in size or have unusual shapes, hence the divit in the center that generates more space. With the surface of the claw containing four strategically placed grip teeth, once clasped with the other side of the claw, very few pieces of clothing, if any, will be difficult for this module to grasp. Though not shown in the generated images, the claw is designed to be on a traditional small scale robotic arm, which again, would not allow for very much mobility. This design is ranked highly in most categories, making a close run for the best possible Module for the final design.
FRDPARRC Tables:
Calculations
Updated Gantt Chart:
The above link is the Gantt Chart for this project. As the semester progresses, the chart will be updated.
Lessons Learned
- I learned that I needed to refresh my CAD skills.
- I learned that procrastination has never, and will never, work in my favor and I should probably never do it again.
- I learned the advantages to narrowing down a certain design.
- I learned that I appreciate the ability to test my creativity, even though I don't have much, in order to generate designs.
- I learned more about degrees of freedom and how to analyze it.
Activities Date and Time
- Updated Problem Statement 10/31/20 1-2pm
- Updated Assumptions about the Problem 10/31/20 2-2:30pm
- Decided which part of the model to generate Modules for 11/05/18 - 11/05/20
- Created a Pugh Decision Matrix 11/06/20 11:15am
- Generated CAD Models for each Module 11/08/20 - 11/11/20
- Analyzed the mobility and grip of each design 11/10/20 10am-2pm
- Regenerated FRDPARRC Tables 11/12/20 9-10am
- Added Assignment 4 to Gantt Chart 11/12/20 10-10:15am
- Uploaded all links to Assignment 4 Page 11/12/20 11:00am
- Viewed Nate Hardy's Webpage 11/12/20 11:15am
- Viewed Philip Brown's Webpage 11/12/20 11:30am
- Final update and check-through of Assignment 3 Page 11/12/20 12:30pm
Comments for Nate Hardy
- Your page and Assignment 4 is organized and easy to manuever.
- You did a good job with the overall understanding of the assignment and I think your Modules were analyzed fairly.
- Your FRDPARRC Table is well organized but still a little difficult to read.
- Overall, really good job!
Comments for Philip Brown
- Your Assigment 4 is neat and well organized.
- You did a great job of displaying each of your modules with a parametric software and they look great on your page.
- Your descriptions of each Module are helpful in understanding your project which I appreciated when viewing your page.
- You seem to have pin-pointed every parameter asked of this assignment and you did a great job.