My Assignments
Assignment #5: Components
Updated Problem Statement:
The purpose of my design is to create a trash can that will replace the trash bag in the empty can automatically through the use of a silicon covered claw.
Assumptions/Specifications
An assumption can be made that the claw must carry a coefficient of friction great enough to be able to firmly grasp the empty bag and drag it to the desired position. The claw must also be able to apply a clamping force of at least 20 lbs to ensure that it does not slip while in motion.
The above link is the Gantt Chart for this project. This will be continually updated as the semester progresses and I get more knowledge of the future assignment details. Therefore, each assignment will be a slightly modified and more updated version of this gantt chart.
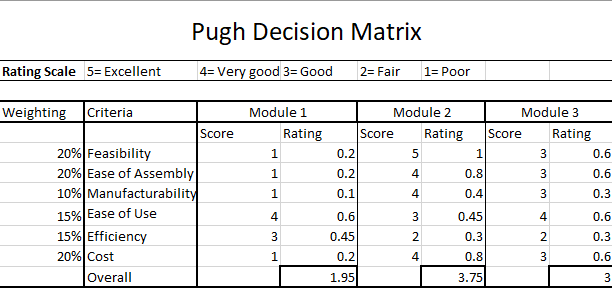
Through the decision matrix we are able to get a better idea of the best approach to our problem.From our matrix we are able to decide that the best solution module would be the silicone grip. Most notably influencing the sustainability and efficiency categories.
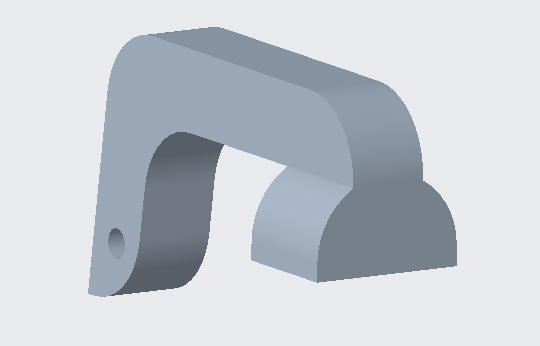
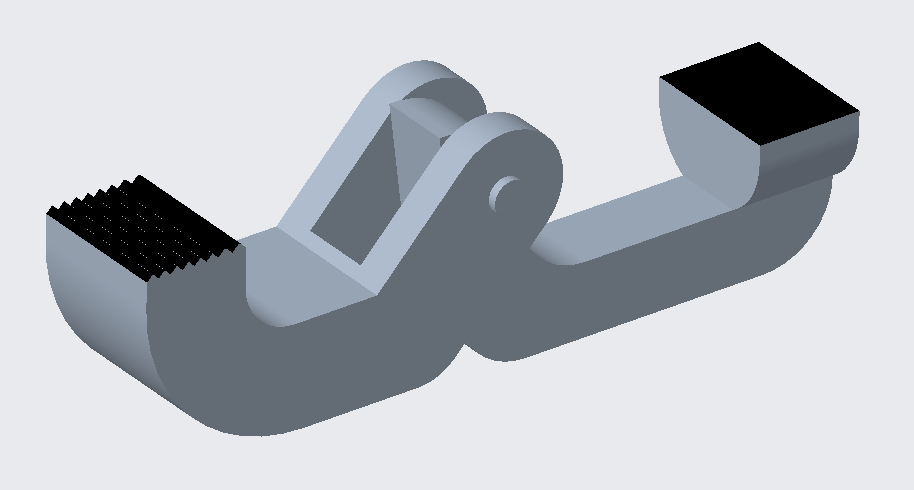
Component 1: Top Grip Arm
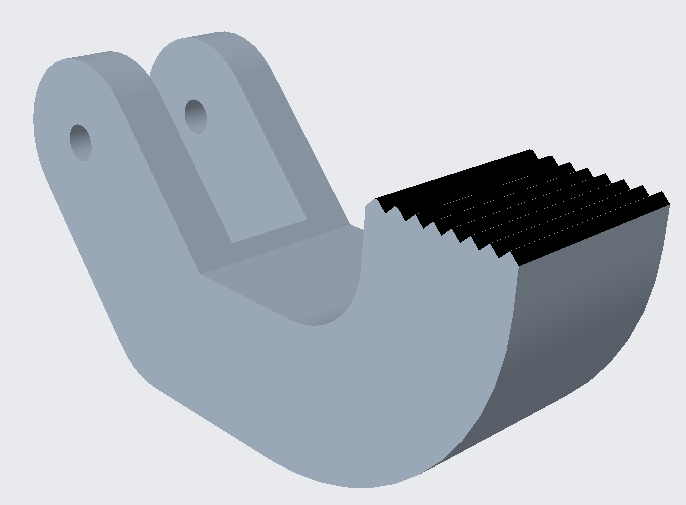
Component 2: Bottom Grip Arm
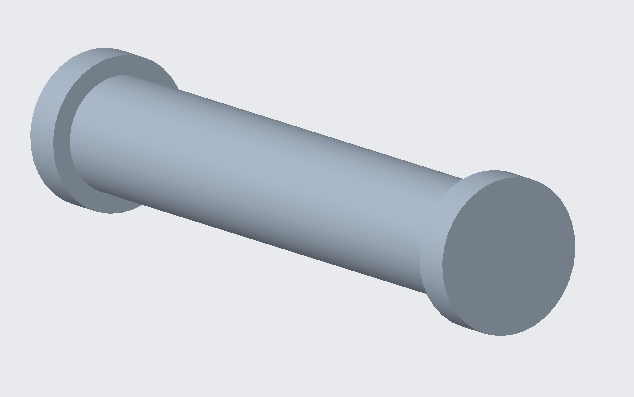
Component 3: Silicon Claw Pin
Assembly of Silicon Claw
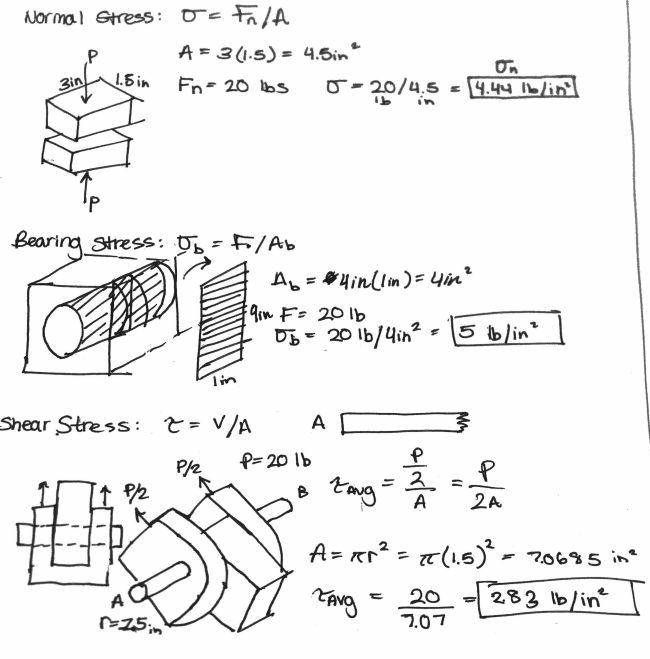
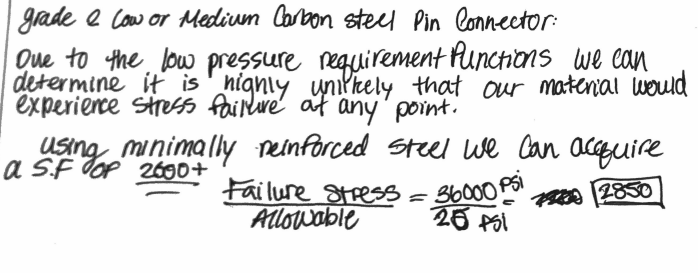
Stress Analysis of Components
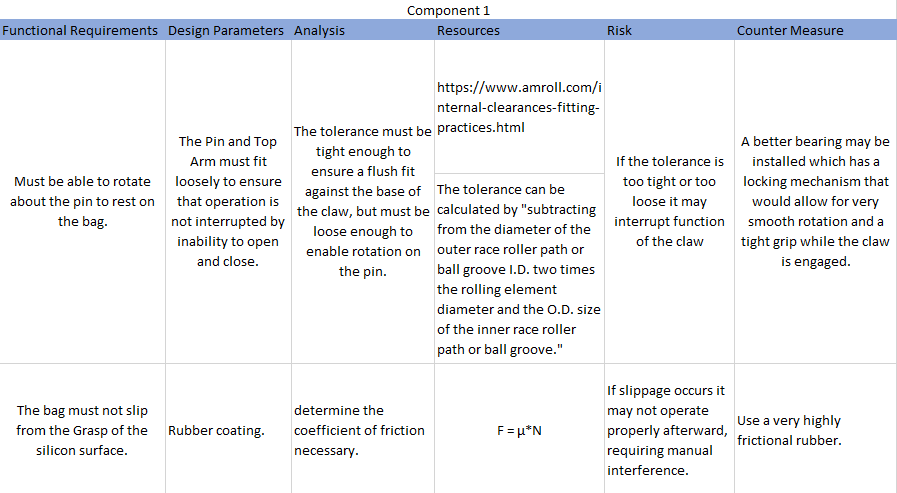
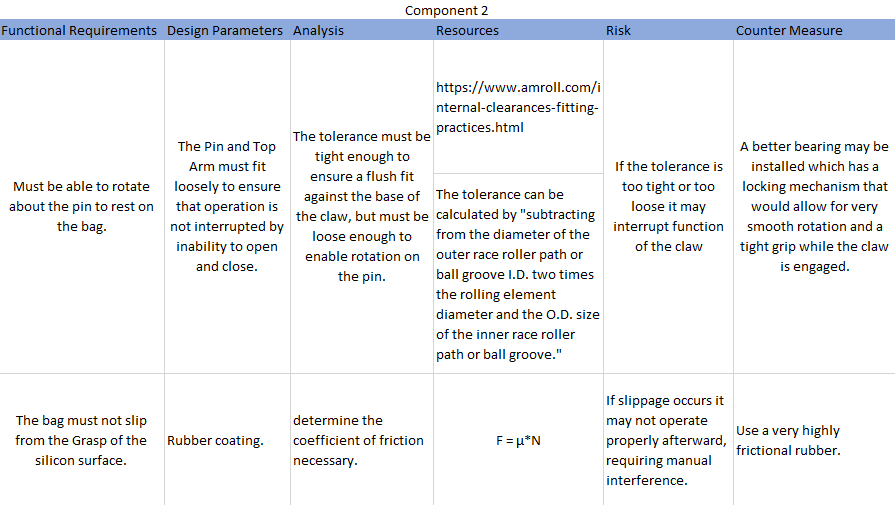
FRDPARRC Tables (Components 1-3)

Lessons Learned
- With this project I learned that procrastination of design is still something that will significantly hinder the quality of your product. It is better to plan ahead and give enough time to think through your problems before tackling them.
- I learned that I love conceptually thinking about solutions, but can understand the large magnitude of determination it requires to put a product into the world.
- Learned how to better organize myself through Gantt Charts.
- Learned how to think broadly about what kind of logistics go into design.
- Learned how to effectively brainstorm multiple problem solutions at once.
- Learned that FRDPARRC Tables stink and require a lot of consideration.
- I learned that there is A LOT of planning that is required for tackling even the easiest of product production.
- Learned how to make a FRDPARRC table that assists in organizing and comparing multiple strategies at once.
- I discovered that I enjoy working in CAD but defnitely need more practice.
Comments for Jazmin Ramos
- At the time this was uploaded Jazmin has not updated her website.