Controls, Optimization, Autonomy and Robotics Laboratory (COAR Lab)
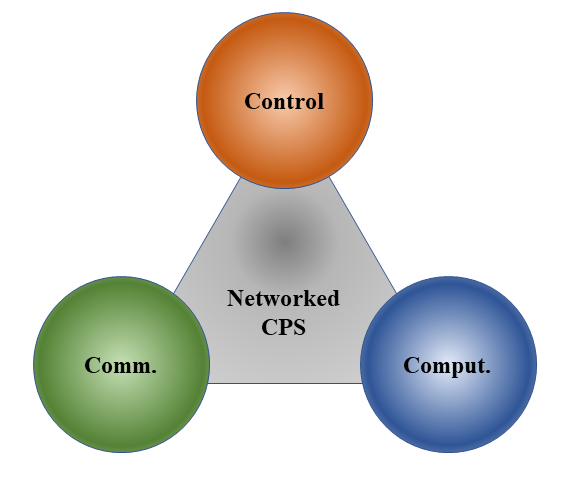 |
At COAR Lab, we are primarily interested in the control-communication-computation co-design for Multi-robot systems and related Networked Cyber-Physical Systems. |
Information Limited Tactical Behaviors
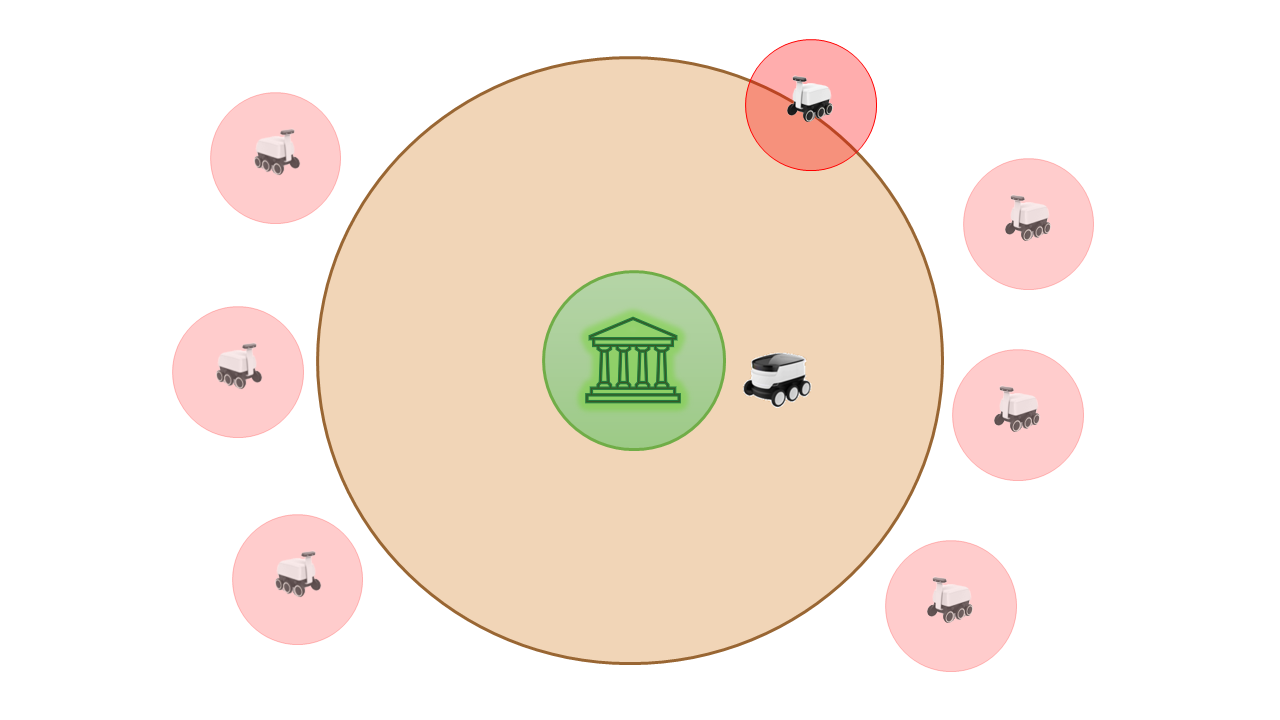 |
In the context of multi-agent systems, we consider how the behaviors and motion of autonomous agents changes as they engage with adversaries. We extend the classical pursuit-evasion type game theoretic models to explicitly incorporate sensing and communication limitations and the resulting information asymmetry among heterogeneous agents. COAR Lab particularly focuses on:
|
Control-Communication Co-design
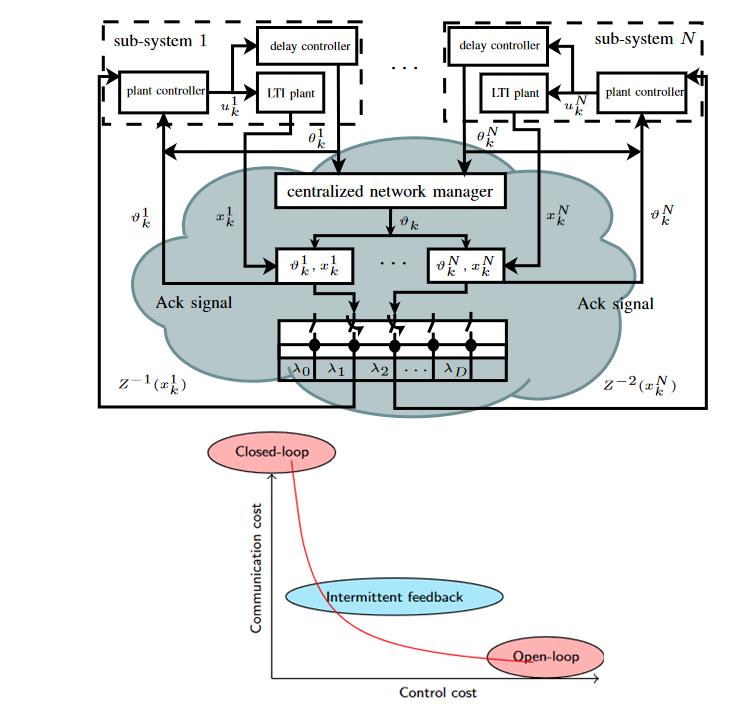 |
Networked Cyber-Physical Systems (Net-CPSs) are consisted of several physical systems, decisions-makers, sensors, and actuators that exchange information over a shared resource constrained communication network. While traditional feedback control theory assumes uninhibited access of timely measurements, such is not necessarily the case when the communication resource is to be shared by several system components. This necessitates the requirement for designing control-aware communication protocols and communication-aware controller synthesis, or equivalently a control-communication co-design framework. COAR Lab particularly focuses on:
|
More details will be added soon. Meanwhile, check out our recent publications to get more information about our current research.