Final Project
Catapult Robot
The final project for LBST 2301 consists of creating a robot that can launch ping-pong balls via a mechanism similar to catapults.The robot will utilize an Arduino Uno for the microcontroller. Hardware will be made through several manufacturing processes, such as laser cutting, 3D printing and purchasing pre-made parts.
The book that inspired this project and will be used as a guide for completing the project is called "Creating Precision Robots: A Project-Based Approach to the Study of Mechatronics and Robotics" by Francis Nickols and Yueh-Jaw Lin. Click here for a link to the book.
Chicago citation for the book:
Nickols, Francis, and Yueh-Jaw Lin. Creating Precision Robots: a Project-Based Approach to the Study of Mechatronics and Robotics. Oxford: Butterworth-Heinemann, an imprint of Elsevier., 2019.
Link to Citation Machine for citations
Image of the theoretical robot from the Creating Precision Robots book (source: Nickols, Francis, and Yueh-Jaw Lin. Creating Precision Robots: a Project-Based Approach to the Study of Mechatronics and Robotics. Oxford: Butterworth-Heinemann, an imprint of Elsevier., 2019.):

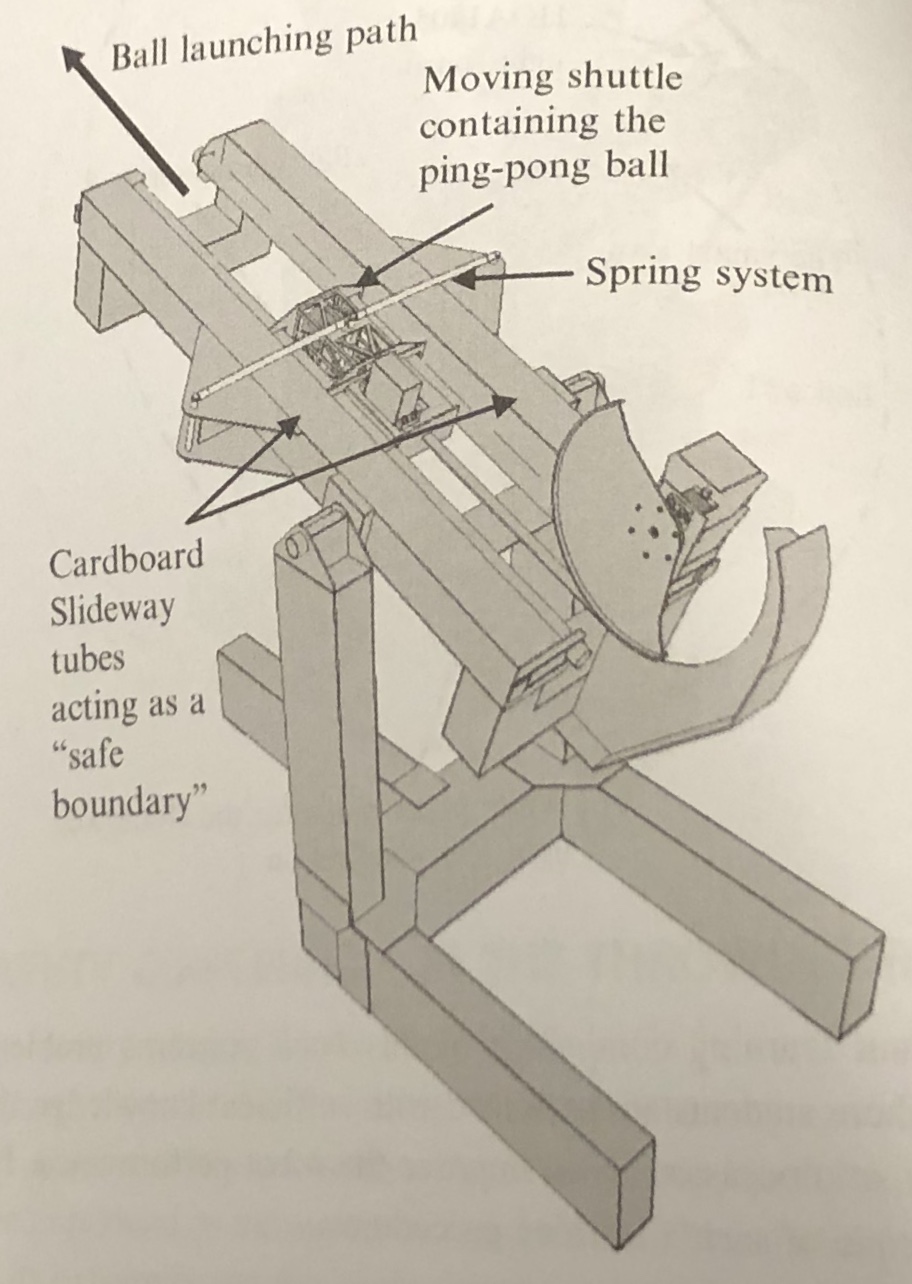
Diagram of the theoretical robot from the Creating Precision Robots book (source: Nickols, Francis, and Yueh-Jaw Lin. Creating Precision Robots: a Project-Based Approach to the Study of Mechatronics and Robotics. Oxford: Butterworth-Heinemann, an imprint of Elsevier., 2019.):